|
| |||
|
Týdeník věnovaný aktualitám a novinkám z fyziky a astronomie. | |||
|
Bionická noha z Utahu
Petr Panchártek
Robotické protézy napodobující biomechaniku chybějící biologické nohy slibují zlepšení mobility a kvality života milionů jedinců po amputaci dolní končetiny. Dosavadní poháněné protézy jsou bohužel mnohem těžší, větší a mají krátkou živostnost baterie. To výrazně omezuje jejich klinickou životaschopnost a využitelnost v každodenním životě postižených lidí.
V dnešním bulletinu si povíme o robotické protéze replikující klíčové biomechanické funkce biologického kolena, kotníku a prstu na noze v sagitální roviněSagitální rovina – rovina procházející tělem zepředu dozadu a rozdělující jej na pravou a levou část., přičemž hmotnost, velikost a životnost baterie odpovídá běžným mikroprocesorem řízeným protézám. Poháněný kolenní kloub využívá jedinečného mechanizmu, který je citlivý na točivý moment a kombinuje výhody elastických aktuátorůAktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován. s výhodami variabilních převodů. Jediný aktuátor pohání klouby kotníku a prstů prostřednictvím poddajného, nedostatečně aktivovanéhoNedostatečně aktivovaný – technický termín používaný v robotice a teorii řízení k popisu mechanických systémů, kterým nelze přikázat, aby sledovaly libovolné trajektorie v konfiguračním prostoru. Tento stav může nastat z řady důvodů, z nichž nejjednodušší je, když má systém nižší počet akčních členů, než je počet stupňů volnosti. V tomto případě se říká, že systém je triviálně poddimenzovaný. mechanizmu. Vzhledem k tomu, že biologický palec u nohy rozptyluje energii v cyklu chůze (tj. odvádí ji), zatímco biologický kotník naopak energii přináší, pak je správně navržený systém (v robotice se v tomto případě hovoří o tzv. nedostatečně aktivovanémNedostatečně aktivovaný – technický termín používaný v robotice a teorii řízení k popisu mechanických systémů, kterým nelze přikázat, aby sledovaly libovolné trajektorie v konfiguračním prostoru. Tento stav může nastat z řady důvodů, z nichž nejjednodušší je, když má systém nižší počet akčních členů, než je počet stupňů volnosti. V tomto případě se říká, že systém je triviálně poddimenzovaný. systému) schopen využívat dodanou mechanickou energii a replikovat klíčové biomechanické funkce komplexu kotník/noha během chůze. Kompaktní rám protézy obepíná všechny mechanické a elektrické součásti pro zvýšení robustnosti a účinnosti. Preklinické testy se třemi jedinci s nadkolenní amputací ukazují, že navrhovaná robotická protéza nohy umožňuje běžné aktivity s blízkou normativní kinematikou a kinetikou. Pomocí volitelného pasivního režimu mohou uživatelé chodit po rovné zemi neomezeně dlouho bez nabíjení baterie, což se dosud nepodařilo u žádné jiné napájené nebo mikroprocesorem řízené protézy. Protéza s těmito vlastnostmi má velký potenciál zlepšit reálnou mobilitu u jedinců s nadkolenní amputací.
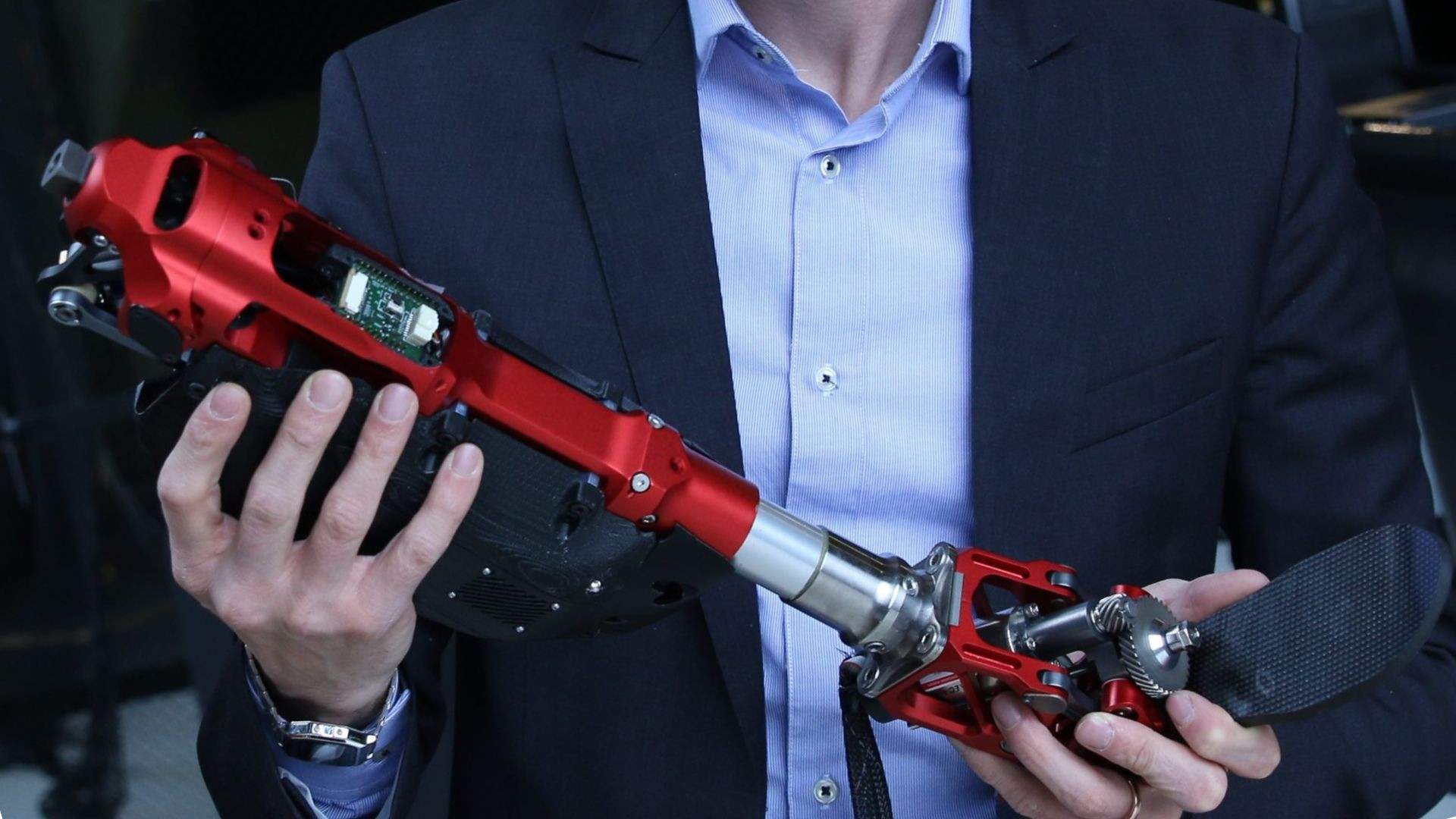
Bionická noha z Utahu. Zdroj: Interesting Engineering.
|
Sagitální rovina – rovina procházející tělem zepředu dozadu a rozdělující jej na pravou a levou část. Nedostatečně aktivovaný – technický termín používaný v robotice a teorii řízení k popisu mechanických systémů, kterým nelze přikázat, aby sledovaly libovolné trajektorie v konfiguračním prostoru. Tento stav může nastat z řady důvodů, z nichž nejjednodušší je, když má systém nižší počet akčních členů, než je počet stupňů volnosti. V tomto případě se říká, že systém je triviálně poddimenzovaný. Hlezenní kloub – kotník, latinsky articulatio talocruralis, je kloub, který spojuje kosti bérce (kost holenní a kost lýtkovou) s kostí hlezenní (jedna ze zánártních kostí). Nárt – metatarsus, pět kůstek tvořících hřbet nohy a spojujících zánártí (tarsus) s prsty nohou. Kontralaterální – ležící na opačné straně, postihující opačnou stranu. Například po mozkové příhodě může dojít ke kontralaterální obrně poloviny těla na opačné straně, než je ložisko mozkové příhody. Opakem je ipsilaterální, ležící na stejné straně. Antagonismus – soupeření dvou neslučitelných nebo oponujících si subjektů, využívaný jako stylistický prvek také v umění (souboj dobra a zla). Artrodéza – chirurgické znehybnění kloubu. Odstraněním kloubních chrupavek dojde ke srůstu kostí. Provádí se u některých těžce poškozených kloubů a jejich silných bolestí. Artro znamená bolest, deo vázat. Holistický přístup – celostní pohled na systém. Vlastnosti systému nelze určit jen pomocí vlastností jeho částí. Naopak celek ovlivňuje podobu a fungování svých částí. |
Dnešní protézy
V současnosti je většina dostupných protéz pro osoby s nadkolenní amputací tvořena pasivními zařízeními, která nemohou replikovat klíčové biomechanické funkce chybějící biologické nohy. Většina protéz kotníku/chodidla se skládá z desky z uhlíkových vláken uzavřené v pryžové skořepině chodidla. Některé protézy kotníku a nohy mají skutečný hlezenní kloubHlezenní kloub – kotník, latinsky articulatio talocruralis, je kloub, který spojuje kosti bérce (kost holenní a kost lýtkovou) s kostí hlezenní (jedna ze zánártních kostí). ovládaný pasivními prvky, jako jsou pružiny a tlumiče. Prakticky všechny dostupné protézy kotníku/chodidla spoléhají na flexibilitu pryžové skořepiny chodidla, aby napodobila pohyb metatarzálníhoNárt – metatarsus, pět kůstek tvořících hřbet nohy a spojujících zánártí (tarsus) s prsty nohou. (prstového) kloubu, a pouze jedna protéza kotníku/nohy dostupná na trhu má kloubový pasivní kloub prstu. U nadkolenních náhrad je protéza kotníku/chodidla spojena s protetickým kolenem, které může mít jednokloubové nebo polycentrické provedení, pasivně ovládané pružinami a tlumiči. U mikroprocesorem řízených protéz lze mechanickou impedanci hlezenního a kolenního kloubu aktivně upravovat během chůze, aby se usnadnila chůze s proměnnou kadencí a zároveň se zlepšila stabilita a snížilo se riziko pádů. Nemohou však aktivně generovat pohyby nebo dodávat energii do cyklu chůze, což jsou klíčové biomechanické funkce biologických nohou. Uživatelé protéz kompenzují tyto nedostatky zbytkem končetiny a kontralaterálníKontralaterální – ležící na opačné straně, postihující opačnou stranu. Například po mozkové příhodě může dojít ke kontralaterální obrně poloviny těla na opačné straně, než je ložisko mozkové příhody. Opakem je ipsilaterální, ležící na stejné straně. nohou, což má za následek pomalejší, méně efektivní a méně stabilní chůzi ve srovnání s osobami bez amputace. Tyto pasivní protézy však nemohou aktivně generovat točivý moment kolene, nebo vykonávat lezení po schodech či rampách. Přechod mezi sezením a stáním je pro jedince s nadkolenní amputací mnohem náročnější než pro osoby bez amputace. Zdokonalení protetických technologií je nezbytné k řešení nenaplněných potřeb milionů jedinců žijících s amputací dolní končetiny.

V současnosti je většina dostupných protéz pro osoby s nadkolenní amputací
tvořena pasivními zařízeními. Zdroj: Prosthetic Solutions.
Robotické protézy napodobují klíčové biomechanické funkce chybějící biologické nohy pomocí palubních ovládacích systémů, senzorů a napájecích zdrojů. Výzkumníci navrhli různé pokročilé návrhy ovládání, které účinně poskytují široký rozsah rychlosti a točivého momentu potřebného k napodobení biologické nohy. Poháněné kolenní protézy lze ovládat pomocí pružin v sérii a paralelně, a to motorem, vícekloubovými aktuátory, antagonistickýmiAntagonismus – soupeření dvou neslučitelných nebo oponujících si subjektů, využívaný jako stylistický prvek také v umění (souboj dobra a zla). aktuátory nebo motory s velkým točivým momentem. Podobně mohou být poháněné protézy kotníkuHlezenní kloub – kotník, latinsky articulatio talocruralis, je kloub, který spojuje kosti bérce (kost holenní a kost lýtkovou) s kostí hlezenní (jedna ze zánártních kostí). ovládáné pomocí čtyřtyčových mechanizmů a polycentrických konstrukcí, pomocí pružiny implementované paralelně nebo sériově k motoru, indukčního nabíjení nebo pomocí kombinace spojek a brzd s motory. Tyto pokročilé ovládací systémy umožnily, aby se na trh dostaly dvě poháněné protézy. Protéza kotníku/chodidla Ottobock Empower používá sériový a paralelní elastický aktuátor, zatímco Ossur Power Knee používá spojitelný sériově elastický aktuátor. Bohužel ani po několika letech na trhu tyto motorové protézy nedosáhly klinického úspěchu. Negativní výsledek pravděpodobně vyplývá z kombinace faktorů, neboť existují klíčová konstrukční omezení, která ovlivňují funkci a použitelnost stávajících poháněných protéz. Napájená zařízení jsou mnohem těžší. Zvýšení hmotnosti protézy negativně ovlivňuje jak biomechaniku, tak klinické výsledky. Větší hmotnost protézy při chůzi korelovala se zvýšenými náklady na metabolickou energii, asymetriemi doby stoje a švihu, namáháním kyčle a sníženou stabilitou objímky. Zvýšení konstrukční výšky protézy a vzdálenosti mezi středem otáčení kolena a vrcholem náhrady tak omezilo počet lidí, kteří mohou protézu použít. Navíc mají poháněné protézy krátkou životnost baterie. Řádově se jedná o několik hodin, což má negativní vliv na použitelnost v reálném životě. Je proto potřeba snížit hmotnost a velikost robotických protéz nohou a prodloužit životnost baterie, aby se jejich klinický účinek zlepšil.

Protéza kotníku/chodidla Ottobock Empower (vlevo) používá sériový a paralelní elastický aktuátor, zatímco Ossur Power Knee (vpravo) používá spojitelný sériově elastický aktuátor. Zdroj: Ottobock a IndiaMart.
Alternativní návrhová strategie pro robotické protézy nohou spočívá například v napájení pouze podskupin daných činností, vyhýbání se dodávání energie nebo úpravě mechanického chování protetického kloubu bez aktivní kontroly pohybů. Vynecháním požadavků na rychlost aktivace a krouticí moment mohou být tyto poloaktivní a kvazipasivní protézy lehčí, menší a přitom mají delší životnost baterie než protézy s plně napájeným pohonem, ale nemohou replikovat klíčové biomechanické funkce chybějící biologické nohy.. Například návrh kolenního ovladače, který pohání pouze chůzi po schodech nebo pouze švihovou fázi chůze, vede k lehčí a menší protéze. Podobně lze vyvinout lehčí a menší protézy kotníku/chodidla, pokud se vyhneme dodávání energie tak, že omezíme aktivní kontrolu pohybů na nenosné činnosti nebo upravíme mechanickou tuhost protetického kloubu. Nedávno bylo navrženo přepínání mezi různými ambulantními aktivitami, čímž se překlenula mezera mezi poloaktivními a plně poháněnými protézami. Toto konstrukční řešení je však na úkor funkčnosti, protože protéza nemůže poskytovat krouticí moment při přeřazování.
Poloaktivní a kvazipasivní protézy jsou obvykle lehčí, menší a mají delší životnost baterie než plně napájená zařízení, ale nemohou replikovat klíčové biomechanické funkce chybějící biologické nohy. Zdroj: Semantic Scholar.
Biomechanické studie neamputované chůze naznačují, že během chůze hraje důležitou funkci kloub spojující nárt a prsty (metatarzální kloub). Jedinci se srůstem nártu a palce (metatarzofalangeální artrodézouArtrodéza – chirurgické znehybnění kloubu. Odstraněním kloubních chrupavek dojde ke srůstu kostí. Provádí se u některých těžce poškozených kloubů a jejich silných bolestí. Artro znamená bolest, deo vázat.) mají zkrácenou délku kroku a snížený pohyb chodidla na postižené straně. Studie s pasivním emulátorem protézy ukazují, že ztuhlost prstového kloubu má podstatný vliv na funkčnost kotníku, těžiště a odtlačování od podložky při chůzi. Předchozí studie navíc prokázala snížení energetických nákladů na chůzi u jedinců s podkolenními amputacemi, pokud se použije pasivní protéza střední částí nohy a kloub mezi nártem a prsty u nohou. Navzdory těmto důkazům byla navržena pouze jedna výzkumná robotická protéza kotníku a chodidla s poháněným prstovým kloubem. Bohužel, funkce přidaného prstu přichází za cenu podstatného zvýšení hmotnosti protézy v důsledku přidání speciálního prstového aktuátoruAktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován.. Proto jsou důležité návrhy, které umožňují replikovat biomechanickou funkci prstového kloubu i u lehké protézy.
Co je bionická noha?
Bionická noha je robotická protéza nohy navržená tak, aby replikovala klíčové biomechanické funkce biologických kloubů kolene, kotníku a prstů na noze v sagitální roviněSagitální rovina – rovina procházející tělem zepředu dozadu a rozdělující jej na pravou a levou část. a zároveň odpovídala hmotnosti, velikosti a životnosti baterie mikroprocesorem řízených protéz. Lehkost, výkon a účinnost jsou umožněny bioinspirovanými návrhy ovládání v kombinaci s holistickým designovým přístupemHolistický přístup – celostní pohled na systém. Vlastnosti systému nelze určit jen pomocí vlastností jeho částí. Naopak celek ovlivňuje podobu a fungování svých částí.. Jedinečný aktuátorAktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován. citlivý na točivý moment dokáže replikovat klíčové biomechanické vlastnosti biologického kolenního kloubu tím, že kombinuje výhody sériově elastických aktuátorů s výhodami variabilních převodů. Aktuátor založený na poddajném, nedostatečně aktivovanémNedostatečně aktivovaný – technický termín používaný v robotice a teorii řízení k popisu mechanických systémů, kterým nelze přikázat, aby sledovaly libovolné trajektorie v konfiguračním prostoru. Tento stav může nastat z řady důvodů, z nichž nejjednodušší je, když má systém nižší počet akčních členů, než je počet stupňů volnosti. V tomto případě se říká, že systém je triviálně poddimenzovaný. mechanizmu může replikovat funkce hlezenního a prstového kloubu a zároveň regenerovat mechanickou energii během chůze. Po vodorovné ploše je dokonce možné chodit neomezeně dlouho bez nabíjení baterie. Protéza s těmito vlastnostmi má potenciál zlepšit reálnou mobilitu u jedinců s nadkolenní amputací.
Popis systému
Navrhovaná poháněná protéza, nazývána „bionická noha z Utahu“, se skládá z nezávislých modulů kolene a kotníku/chodidla. Kolenní modul používá jedinečný aktuátorAktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován. citlivý na točivý moment, který funguje jako proměnná převodovka, která pasivně, plynule a rychle mění točivý moment v reakci na protažení kolene a konstrukční geometrií. Modul kotníku/chodidla využívá poddajný, nedostatečně aktivovanýNedostatečně aktivovaný – technický termín používaný v robotice a teorii řízení k popisu mechanických systémů, kterým nelze přikázat, aby sledovaly libovolné trajektorie v konfiguračním prostoru. Tento stav může nastat z řady důvodů, z nichž nejjednodušší je, když má systém nižší počet akčních členů, než je počet stupňů volnosti. V tomto případě se říká, že systém je triviálně poddimenzovaný. mechanizmus k napájení jak kotníku, tak kloubu palce. Tento poddajný, nedostatečně aktivovaný mechanizmus přenáší mechanickou energii z prstu na hlezenní kloub, čímž zlepšuje účinnost a zároveň ukládá a uvolňuje energii v lehké pružinové sestavě. Moduly kolene a kotníku/chodidla mají nezávislé palubní zdroje napájení a vestavěné elektronické systémy. Oba moduly byly navrženy na základě norem Mezinárodní organizace pro standardizaci (ISO), což usnadňuje jejich použití mimo laboratoř. Podobně poháněné protézy navržené výzkumnými laboratořemi, které ještě nebyly uvedeny na trh, jsou o 50 až 100 % těžší než bionická noha z Utahu, která má další poháněný kloub prstu a obsahuje všechny mechanické a elektrické součásti. Jak komerčně dostupné protézy, tak poháněné protézy navržené výzkumnými laboratořemi mají ve srovnání s bionickou nohou z Utahu větší poměr osy kloubu k délce protézy. Ačkoliv životnost baterie závisí na mnoha faktorech, tak bionickou nohu z Utahu lze provozovat v pasivním režimu, což umožňuje uživateli chodit bez nutnosti nabíjet baterii. V tomto pasivním režimu se kolenní kloub chová primárně jako tlumič, zatímco hlezenní kloub se chová primárně jako pružina. Mikroprocesorem řízená protéza napodobuje mechanické chování kolene a kotníku/chodidla.

Přehled systému. Nalevo je fotografie Bionické nohy z Utahu a napravo částečný řez modelem protézy se zvýrazněním hlavních elektrických a mechanických součástí. Zdroj: Science Robotics.
Testy poháněné protézy
Preklinické testy se třemi účastníky s nadkolenní amputací ukázaly, že bionická noha z Utahu poskytuje kinematiku a kinetiku chůze podobnou jako u jedinců bez amputace. Špičkový kloub fungoval podle očekávání: během chůze odpovídalo jeho chování simulaci a při sestupu ze schodů dosáhl ještě většího rozsahu pohybu, než nebyl původně simulován. Mezi účastníky byly viditelné rozdíly v rané fázi chůze. Účastník 2 prokázal fyziologický postoj flexe v koleni s kinematickými a kinetickými profily, které se těsně shodují s referencemi u neamputovaných pacientů. Naproti tomu účastník 1 vykazoval relativně malý a konstantní úhel flexe kolene v postoji a účastník 3 držel koleno plně natažené proti mechanickému koncovému dorazu během raného postoje. Abnormální flexe kolenního kloubu ve stoje je často v protetice pozorována a je spíše způsobena obvyklými kompenzačními pohyby, které používají k chůzi jedinci s amputací, než ovládacími prvky nebo mechanikou bionické nohy z Utahu. Kromě toho byly viditelné rozdíly v biomechanice bionické nohy z Utahu a u jedinců bez amputace. Při výstupu po schodech se poháněná protéza kotníku aktivně neodsunula, což vedlo k viditelným rozdílům v kinetice kotníku. Tyto rozdíly byly způsobeny používaným aktuátorem, který nerealizoval odtlačování kotníku, spíše než mechanikou poháněné protézy. Při sestupu ze schodů poskytoval poháněný protetický kotník nižší točivý moment než biologický kotník. Odporový moment kotníku byl nastaven během pilotních testů na základě zpětné vazby obdržené od účastníků. Pozorovaný rozdíl byl tedy způsoben spíše subjektivní preferencí než mechanikou protézy. Navzdory těmto omezením předběžné klinické testy ukázaly potenciál navrhované poháněné protézy replikovat klíčové biomechanické funkce biologické nohy během chůze, výstupu po schodech a sestupu ze schodů.
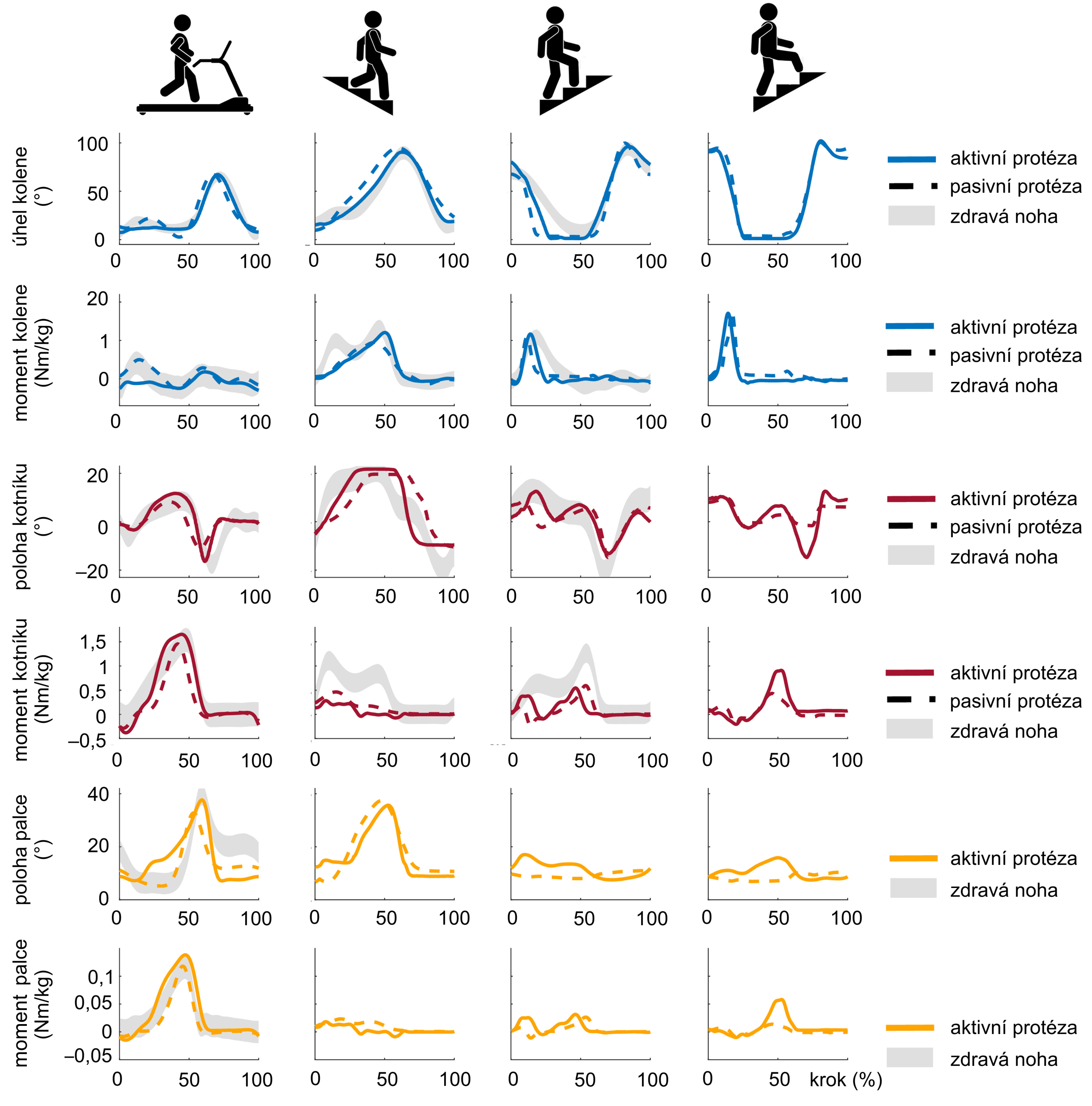
Kinematika a kinetika ve čtyřech pohybových aktivitách, s kloubními úhly a kloubními momenty zaznamenanými u tří účastníků s amputací. Barevné čáry označují střední hodnoty po 10 krocích. Stínované oblasti šedou barvou označují biomechanickou referenci neamputovaného pacienta a přerušované křivky označují referenci pasivní protézy. Zdroj: Science Robotics.
Závěr
Robotické protézy, které replikují klíčové biomechanické funkce chybějící biologické nohy, mají potenciál zlepšit chůzi milionům lidí žijících s amputací nad kolenem. Nadměrná hmotnost, velikost a krátká výdrž baterie zabránily stávajícím robotickým protézám nohou dosáhnout klinického úspěchu. AktuátorAktuátor – elektrostatický nebo hydraulický prvek. Takové prvky se využívají jak v nanotechnologiích, tak v klasických technologiích. V nanotechnologiích převádí prvek zaslanou informaci na mechanickou akci. V makrosvětě jde například o systém aktivní optiky – pod zrcadlem je sada aktuátorů, která kompenzuje jeho tvarové změny v závislosti na řídícím signálu. Podmínkou je, aby změny tvaru zrcadla probíhaly s vyšší frekvencí než změny v obrazu, který je korigován. citlivý na točivý moment může umožnit malému a lehkému motoru, aby efektivně poskytoval široký rozsah točivého momentu a rychlosti požadované pro kolenní protézu. Poddajný, nedostatečně aktivovanýNedostatečně aktivovaný – technický termín používaný v robotice a teorii řízení k popisu mechanických systémů, kterým nelze přikázat, aby sledovaly libovolné trajektorie v konfiguračním prostoru. Tento stav může nastat z řady důvodů, z nichž nejjednodušší je, když má systém nižší počet akčních členů, než je počet stupňů volnosti. V tomto případě se říká, že systém je triviálně poddimenzovaný. systém může současně pohánět palec a hlezenní kloub a také umožnit podstatnou regeneraci mechanické energie. Tato konstrukční řešení umožňují robotické protéze nohy replikovat klíčové biomechanické funkce biologického kolena, kotníku, prstu na noze v sagitální roviněSagitální rovina – rovina procházející tělem zepředu dozadu a rozdělující jej na pravou a levou část. a odpovídat rozumné hmotnosti, velikosti a životnosti baterie pro mikroprocesorem řízené protézy.
Provedená studie poskytuje vědecký nástroj pro studium mechaniky chůze po amputaci a zlepšení mobility jedinců s amputací nad kolenem v reálném životě. Bionická noha z Utahu může vědcům umožnit studovat jak účinky regenerace energie, tak účinek aktivní kontroly mechaniky chůze po amputaci bez matoucího účinku hmotnosti protézy. Navíc s využitím její lehké konstrukce by budoucí studie využívající bionickou nohu z Utahu mohly zahrnovat starší a nemocné účastníky, kteří postrádají sílu a rovnováhu potřebnou k používání těžších zařízení. Bionická noha z Utahu navíc splňuje základní požadavky pro domácí použití. To může umožnit výzkumníkům provádět studie mimo laboratorní prostor, čímž se rozšíří oblast výzkumu poháněných protéz.
* * *
„Člověku, který si zlomil nohu, můžeme v jeho neštěstí pomoci tím,
že
ho přesvědčíme, jak snadno si mohl zlámat vaz.“
Immanuel Kant
Odkazy
- Minh Tran, Lukas Gabert, Sarah Hood, Tommaso Lenzi: A lightweight robotic leg prosthesis replicating the biomechanics of the knee, ankle, and toe joint; Science Robotics, 23 Nov 2022
- Baba Tamim: The users can effectively manipulate the prosthetics exactly like they would with an intact limb; Interesting Engineering, 8 Oct 2022
- Minerva V. Pillai, H. Kazerooni, Andrew Hurwich: Design of a semi-active knee-ankle prosthesis; Semantic Scholar, 9 May 2011
- Awad Mohammed Abouhossein et al.: Towards a Smart Semi-Active Prosthetic Leg: Preliminary Assessment and Testing; IFAC-PapersOnLine. 49 (2016) 170–176
- Prosthetic Solutions: Lower Limb Prosthetics
- Ottobock: Empower
- InidaMart: Ossur Power Knee
- Hanzlová, Hemza: Anatomické názvosloví, roviny a směry lidského těla; MUNI, 2012
- Wikipedia: Underactuation
- NZIP: Hlezenní kloub
- Velký lékařský slovník: kontralaterální
- Velký lékařský slovník: metatarsus
- Velký lékařský slovník: metatarzofalangeální
- Velký lékařský slovník: artrodéza
- Velký lékařský slovník: plantární
- Management Mania: Holistický princip, holistický přístup (Holistic Principle, Approach)
![]()
![]()
